#include <Adafruit_PWMServoDriver.h>
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
// valeurs approximatives qui peuvent varier d'un servomoteur à l'autre:
#define SERVOMIN 150 // Position minimale
#define SERVOMAX 600 // Position maximale
int pulseLen;
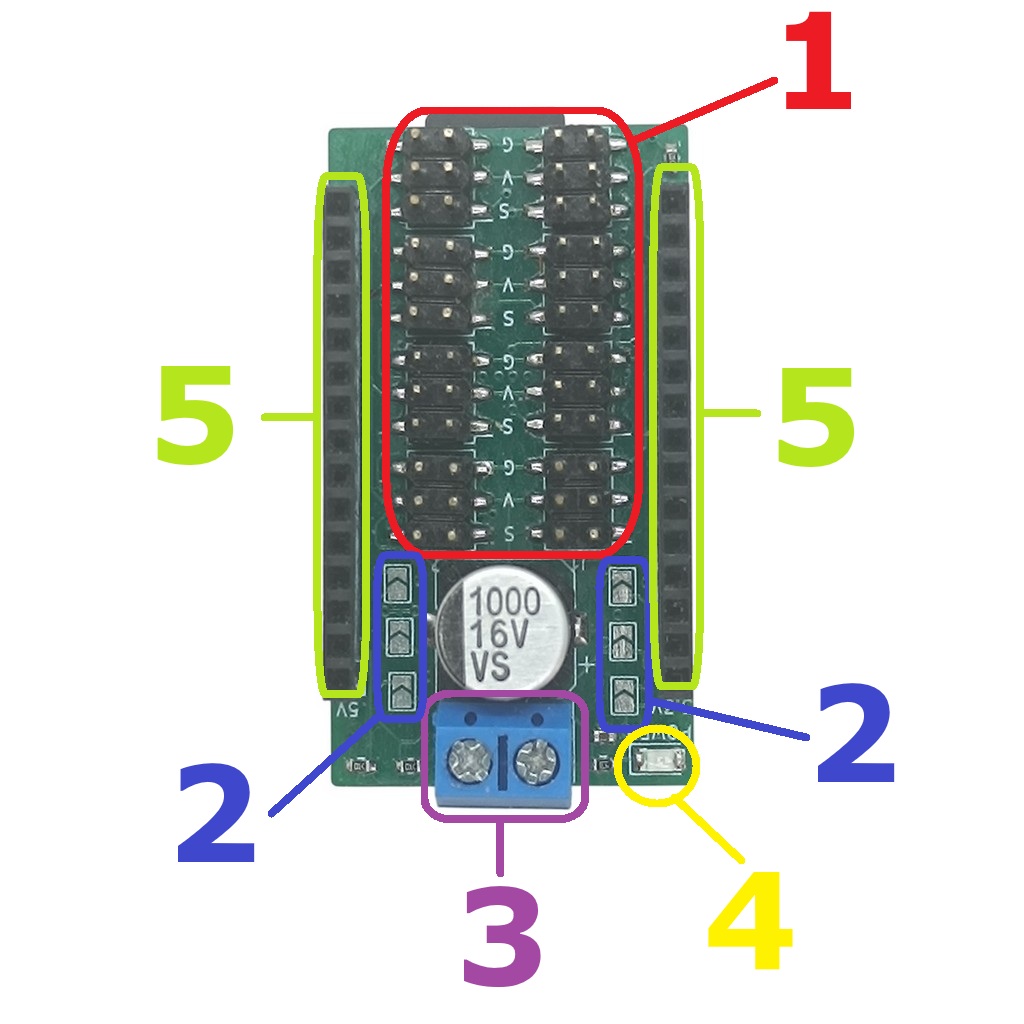
//Attribution des broches Servomoteurs
uint8_t servo1 = 0;
uint8_t servo2 = 1;
uint8_t servo3 = 2;
uint8_t servo4 = 3;
uint8_t servo5 = 4;
uint8_t servo6 = 5;
void setup() {
pwm.begin();
pwm.setPWMFreq(60);
delay(1000);
pulseLen = map( 90, 0, 180, SERVOMIN, SERVOMAX );
pwm.setPWM(servo1, 0, pulseLen);
delay(100);
pwm.setPWM(servo2, 0, pulseLen);
delay(100);
pwm.setPWM(servo3, 0, pulseLen);
delay(100);
pwm.setPWM(servo4, 0, pulseLen);
delay(100);
pwm.setPWM(servo5, 0, pulseLen);
delay(100);
pwm.setPWM(servo6, 0, pulseLen);
delay(3000);
}
void loop() {
pulseLen = map( 20, 0, 180, SERVOMIN, SERVOMAX ); //Positionnement des servomoteurs à 20 degrés
pwm.setPWM(servo1, 0, pulseLen);
pwm.setPWM(servo2, 0, pulseLen);
pwm.setPWM(servo3, 0, pulseLen);
pwm.setPWM(servo4, 0, pulseLen);
pwm.setPWM(servo5, 0, pulseLen);
pwm.setPWM(servo6, 0, pulseLen);
delay(2000);
pulseLen = map( 160, 0, 180, SERVOMIN, SERVOMAX ); //Positionnement des servomoteurs à 130 degrés
pwm.setPWM(servo1, 0, pulseLen);
pwm.setPWM(servo2, 0, pulseLen);
pwm.setPWM(servo3, 0, pulseLen);
pwm.setPWM(servo4, 0, pulseLen);
pwm.setPWM(servo5, 0, pulseLen);
pwm.setPWM(servo6, 0, pulseLen);
delay(2000);
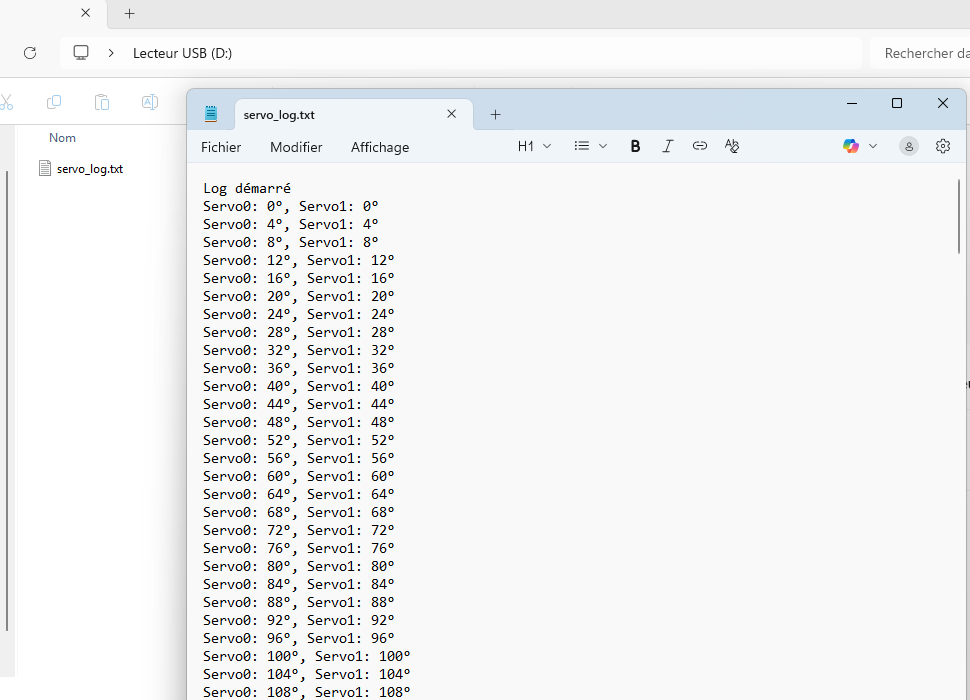
// Balayage de 0° à 180°
for (int angle = 0; angle <= 180; angle++) {
int pulseLen = map(angle, 0, 180, SERVOMIN, SERVOMAX);
// Bouge les 6 servos en même temps
for (int servo = 0; servo < 6; servo++) {
pwm.setPWM(servo, 0, pulseLen);
}
delay(15); // petite pause pour mouvement fluide
}
delay(500);
// Retour de 180° à 0°
for (int angle = 180; angle >= 0; angle--) {
int pulseLen = map(angle, 0, 180, SERVOMIN, SERVOMAX);
for (int servo = 0; servo < 6; servo++) {
pwm.setPWM(servo, 0, pulseLen);
}
delay(15);
}
delay(500);
}