


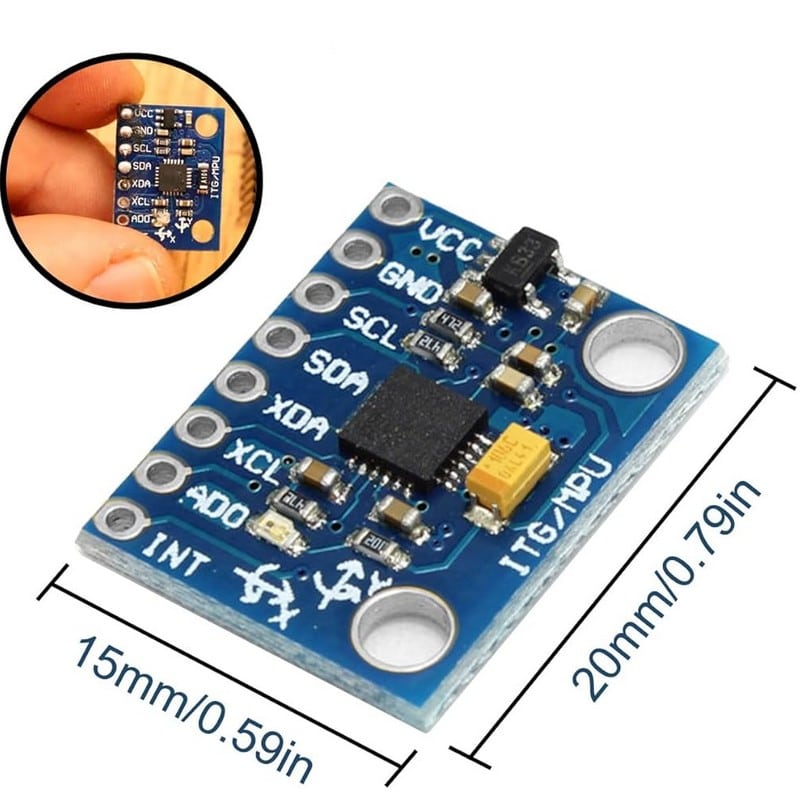
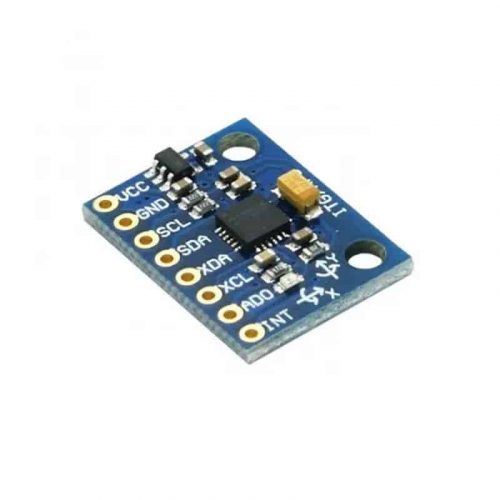
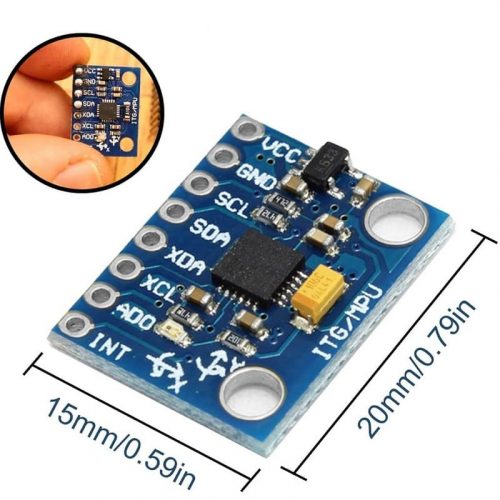
Plongez dans la précision du mouvement avec le module MPU6050. Grâce à ses plages de mesure configurables et son convertisseur 16 bits, il délivre des données fiables pour l’analyse des mouvements, le contrôle gestuel, la stabilisation et la navigation inertielle. Compact (≈25 × 15 mm) et adapté aux applications embarquées.
Conçu pour être simple à intégrer, le module se pilote via I²C et peut être utilisé avec des bibliothèques Arduino populaires pour récupérer l’accélération, la vitesse angulaire et exploiter éventuellement le DMP (Digital Motion Processing) présent sur certaines versions.
Caractéristiques techniques
- Alimentation : 2,3–5 Vcc (modules breakout typiques acceptent 3.3–5 V)
- Consommation : ~3,9 mA maxi
- Accéléromètre : Plages ±2 g, ±4 g, ±8 g, ±16 g
- Gyroscope : Plages ±250, ±500, ±1000, ±2000 °/s
- Interface : I²C (SDA, SCL)
- Convertisseur AD : 16 bits
- Température de service : -40 °C à +85 °C
- Dimensions : ≈ 25 × 15 mm (varie selon breakout)
Avantages du module MPU6050
- Données 6 axes précises : Accéléromètre + gyroscope avec conversion 16 bits pour un bon ratio précision/poids.
- Plages configurables : Adaptez la sensibilité aux besoins (±2 g → ±16 g ; ±250 → ±2000 °/s).
- Faible consommation : Conçu pour les applications embarquées.
- Compatibilité large : Fonctionne facilement avec Arduino, Raspberry Pi et bibliothèques existantes.
- Petit format : Intégration aisée sur robots, drones, wearables et systèmes de contrôle.
Applications recommandées
- Navigation et positionnement : Estimation d’orientation, systèmes IMU.
- Robotique : Stabilisation, contrôle de mouvement et détection d’inclinaison.
- Équipements sportifs & médicaux : Analyse des mouvements et suivi d’activité.
- Projets éducatifs : Initiation aux capteurs inertiels et fusion de capteurs.
- Contrôle gestuel : Interfaces basées sur détection de mouvements rapides ou lents.
Conseils d’utilisation du module MPU6050
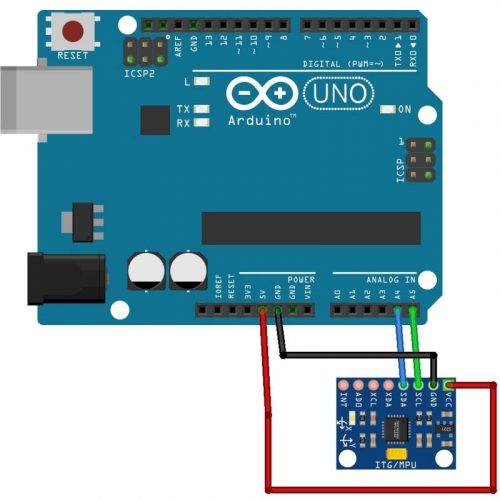
- Connexion : SDA → SDA MCU, SCL → SCL MCU, VCC → 3.3–5 V (selon breakout), GND → Masse.
- Protocole : Utilisez I²C ; adresse par défaut 0x68 (AD0 = 0) ou 0x69 (AD0 = 1) selon le module.
- Initialisation : Lancer la configuration via une bibliothèque MPU (Wire + MPU library sur Arduino) et calibrer gyroscope/accéléromètre.
- Filtrage : Appliquez des filtres (complémentaire, Kalman ou DMP) pour obtenir des données d’orientation stables.
- Alimentation : Respectez les recommandations du breakout ; si vous alimentez en 5 V, vérifiez que le module dispose d’un régulateur et de traducteurs de niveau.
- Température : Gardez le module dans la plage de fonctionnement indiquée et évitez les chocs thermiques brusques.


