
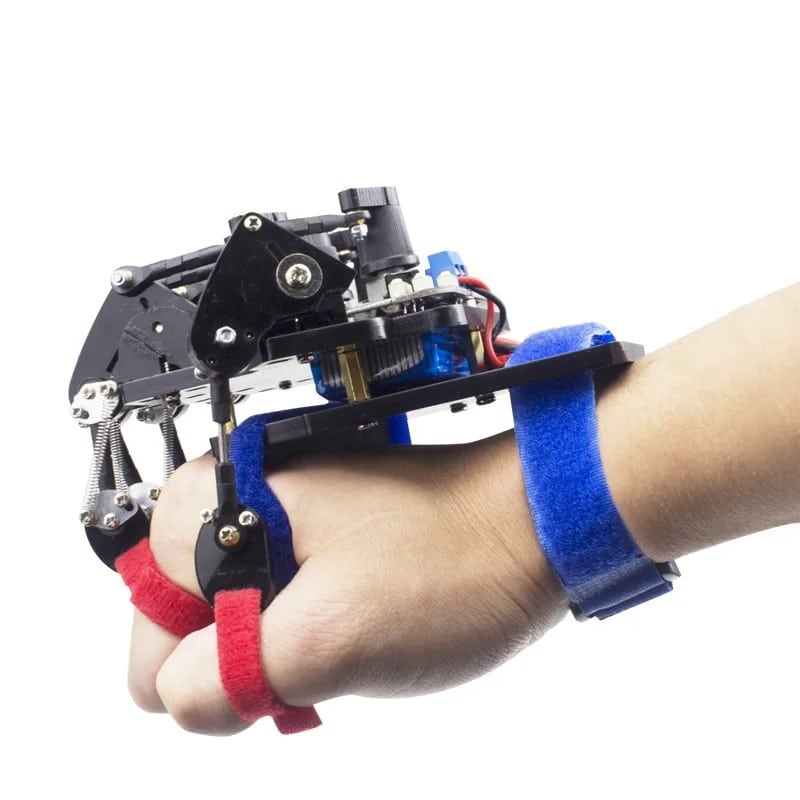
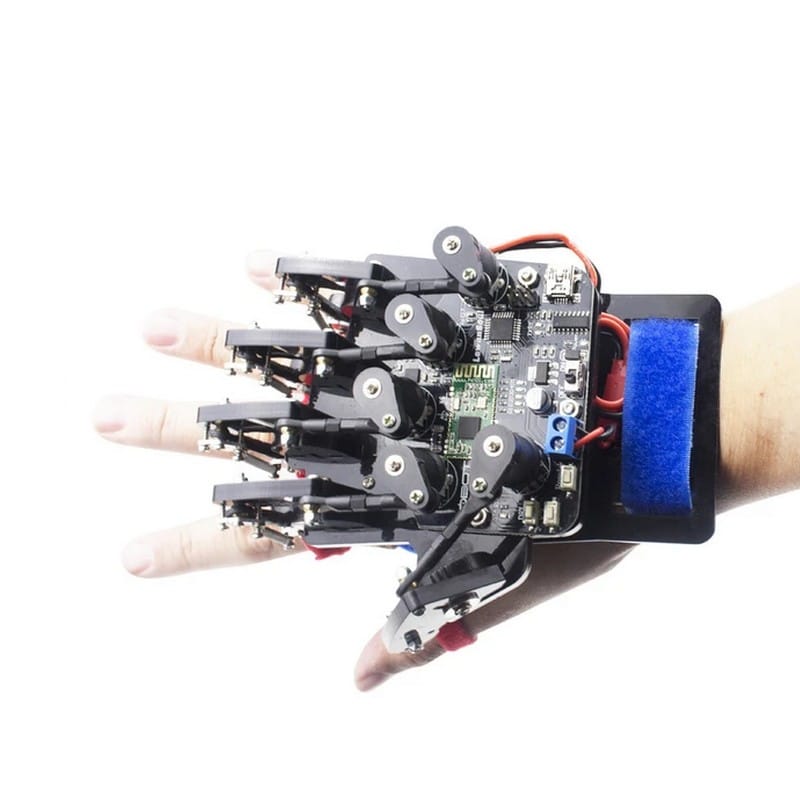
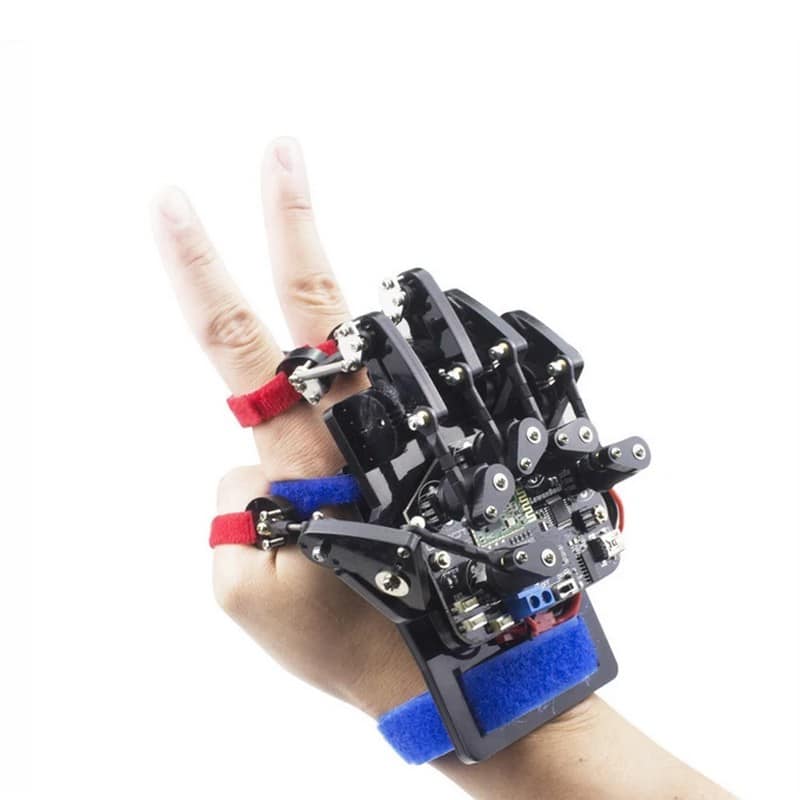
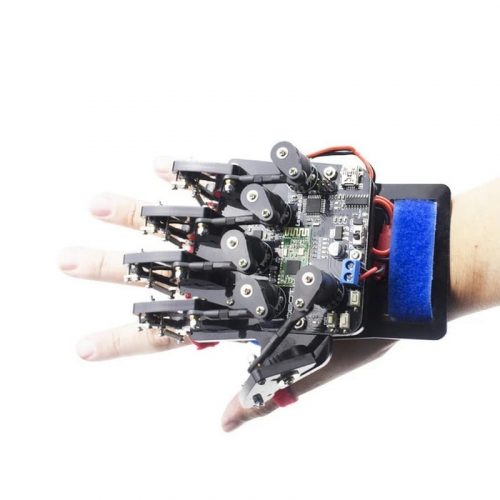
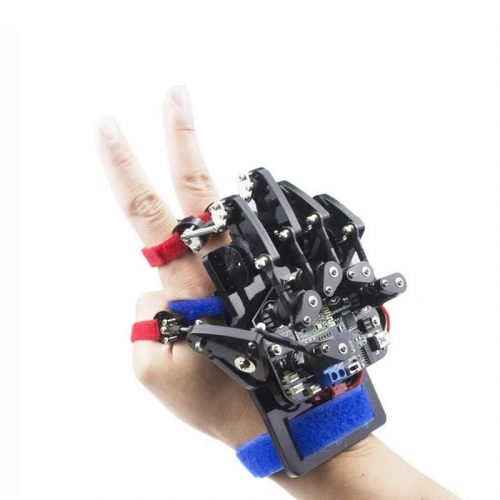
Équipé de capteurs d’inclinaison, le gant mécanique bionique détecte précisément les mouvements et la posture de la main, transmettant les données via un module sans fil à l’appareil cible. Léger et ergonomique, il permet une utilisation prolongée sans fatigue et est parfait pour makers, étudiants et passionnés de robotique.
Caractéristiques techniques
- Technologie de communication : Sans fil entre gant et équipement terminal
- Capteur d’inclinaison : Détecte les mouvements de la main
- Compatibilité : Arduino et autres plateformes open-source
- Taille du gant : 147 x 114 mm
- Poids : 0.32 kg
- Matériaux : Légers et résistants pour usage prolongé
- Connexion : Possible avec ordinateur ou bras robotique
Avantages du gant mécanique bionique
- Contrôle en temps réel : Communication sans fil fiable.
- Mouvements précis : Technologie somatosensorielle avancée.
- Compatibilité : Arduino, Raspberry Pi et plateformes robotiques.
- Apprentissage interactif : Programmation et robotique éducative.
- Léger et ergonomique : Utilisation prolongée sans fatigue.
- Open-source : Possibilité de modifications et optimisations personnalisées.
Applications recommandées
- Contrôle de bras robotique : À distance et en temps réel.
- Projets open-source : Arduino et robotique DIY.
- Simulations bioniques : Gestes et mouvements interactifs.
- Jeux et réalité augmentée : Interaction homme-machine.
- Expérimentations : Recherche et prototypage technologique.
Fonctionnement du gant mécanique bionique
- Capture des mouvements : Capteur d’inclinaison intégré dans le gant.
- Transmission : Module sans fil envoie les données à l’appareil cible.
- Exécution : Le dispositif terminal (robot, PC, etc.) reçoit et exécute les commandes.
- Interaction en temps réel : L’utilisateur contrôle le dispositif instantanément.